
Copyright © 2012 ARM Limited. All rights reserved.
ARM DAI 0321A (ID091712)
ARM Cortex
™
-M Programming Guide to
Memory Barrier Instructions
Application Note 321
Released on: 17 September 2012

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 2
ID091712 Non-Confidential
ARM Cortex-M Programming Guide to Memory Barrier Instructions
Application Note 321
Copyright © 2012 ARM Limited. All rights reserved.
Release Information
Proprietary Notice
Words and logos marked with
®
or
™
are registered trademarks or trademarks of ARM
©
Limited in the EU and other
countries, except as otherwise stated below in this proprietary notice. Other brands and names mentioned herein may
be the trademarks of their respective owners.
Neither the whole nor any part of the information contained in, or the product described in, this document may be
adapted or reproduced in any material form except with the prior written permission of the copyright holder.
The product described in this document is subject to continuous developments and improvements. All particulars of the
product and its use contained in this document are given by ARM in good faith. However, all warranties implied or
expressed, including but not limited to implied warranties of merchantability, or fitness for purpose, are excluded.
This document is intended only to assist the reader in the use of the product. ARM Limited shall not be liable for any
loss or damage arising from the use of any information in this document, or any error or omission in such information,
or any incorrect use of the product.
Where the term ARM is used it means “ARM or any of its subsidiaries as appropriate”.
Confidentiality Status
This document is Non-Confidential. The right to use, copy and disclose this document may be subject to license
restrictions in accordance with the terms of the agreement entered into by ARM and the party that ARM delivered this
document to.
Unrestricted Access is an ARM internal classification.
Product Status
The information in this document is final, that is for a developed product.
Web Address
http://www.arm.com
Table 1 Change history
Date Issue Confidentiality Change
17 September 2012 A Non-Confidential First release

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 3
ID091712 Non-Confidential
1 Introduction
This section introduces the ARM Cortex-M processors and memory barriers. It contains the
following sub-sections:
• ARM Cortex-M Processors
• Memory barriers
• The need for memory barriers on page 4
1.1 ARM Cortex-M Processors
The ARM Cortex-M processors are high performance, low cost, low power, 32-bit RISC
processors, designed for microcontroller applications. The range includes the Cortex-M3,
Cortex-M4, Cortex-M0, Cortex-M0+, and Cortex-M1 processors. The Cortex-M1 processor is
targeted at implementation in FPGA devices.
Cortex-M processors differ from other ARM processors, including the Cortex-A/R processors,
because they only execute Thumb instructions. They are based on the ARMv7-M and
ARMv6-M architectures and have an efficient instruction pipeline, with low-latency Interrupt
Service Routine (ISR) entry and exit. The Cortex-M3 and Cortex-M4 processors also include
hardware divide and Multiply Accumulate (MAC) operations.
In addition to the CPU core, the Cortex-M processors include a number of components that have
a consistent architectural memory map. These include:
• Nested Vectored Interrupt Controller (NVIC)
• optional Memory Protection Unit (MPU)
• System Tick Timer
• debug and trace.
1.2 Memory barriers
Memory barriers are defined in the ARM architecture and are implemented by all processors in
the ARM Cortex family. Table 2 shows the Cortex-M processors covered by this document:
Memory barriers are essential in high-performance processor implementations where
instructions can be executed out of programmed order. Memory barriers might also be
implemented in low-end processors.
Memory barriers can be triggered by hardware operations within the processor or by memory
barrier instructions. This document describes the memory barrier instructions available in the
Cortex-M processors, how they are related to the memory architecture, and when these
instructions are required. Case-by-case details on page 20 explains the differences between the
architectural requirements and the specific Cortex-M processor implementations that can be
more relaxed.
Table 2 Cortex-M processors covered by this document
Processor Revision
Cortex-M0 r0p0
Cortex-M0+ r0p0
Cortex-M3 r0p0 to r2p1
Cortex-M4 r0p0 to r0p1
Cortex-M1 r0p0 to r1p0

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 4
ID091712 Non-Confidential
1.3 The need for memory barriers
The ordering of data transfers within a memory system can be different from the programmed
transfer sequence. This does not mean that there is a system error or that, for example, a C
compiler has generated incorrect code. In most cases, the C compiler might have cached some
data in registers, or reordered some operations to permit the program to run faster.
For peripheral accesses, the peripheral registers must be declared with the
volatile
keyword to
prevent the C compiler from caching the data. In this way, each time a volatile register is
accessed, the processor will generate a corresponding transfer on the bus interface. However,
problems might still occur if you define the peripheral address space as cacheable.
For most simple microcontrollers, if all peripheral devices are declared as volatile, and their
memory spaces are defined as non-cacheable, then no further action is required to maintain
memory access ordering. However, as microcontroller products become more sophisticated,
these simple arrangements are not sufficient. For example:
• processors can re-order memory transfers to improve performance if it does not affect the
behavior of the instruction sequence
• processors can have multiple bus interfaces that have different wait-states
• processors can have write buffers, and some write buffers can merge multiple transfers
into a single transfer.
You might also have to consider that:
• memory, or devices in the memory map, can be presented on different branches of the
internal bus
• some memory accesses can be speculative
• write buffers can be present on the system bus
• some instructions can be restarted, for example, multiple load/store instructions including
LDM
,
STM
.
You can use memory barrier instructions to aid ordering between memory accesses, or between
memory accesses and other operations, when the operation sequences require such ordering to
be preserved. Without memory barrier instructions, it is possible to have race conditions
between steps of an operation that can cause errors in applications.
A memory barrier instruction:
• is required between two memory accesses if an external observer, for example, another
processor, uses the related data
• can be required between a memory operation and an interrupt
• can be required between a memory operation and an event
• can be required between a memory operation and a system control operation.
For example, in the ARM Cortex-M processors, you can also use the Data Memory Barrier
(
DMB
) instruction to ensure that the affect of a memory access takes effect before the next
operation.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 5
ID091712 Non-Confidential
Figure 1 shows the
DMB
instruction being used to ensure memory ordering by stalling the
pipeline.
Figure 1 Data Memory Barrier instruction stalling the pipeline
Instruction N
(memory write)
Instruction N +2
Memory barrier
instruction
Instruction N+3
(memory write)
Store
instruction
Store
instruction
Instruction N+1
Memory barrier instruction
(e.g. DMB)
Actual memory access operation
Actual memory access operation
Pipeline stalled
Time
ALU
operation
(e.g. ADD)
The memory barrier ensures all outstanding
memory operations complete before instruction
N+3 performs any memory accesses

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 6
ID091712 Non-Confidential
2 Memory Type and Memory Ordering
This section gives an overview of memory types and the memory ordering model supported by
the ARMv7-M and ARMv6-M architectures. This section contains the following sub-sections:
• Overview of memory types
• Memory ordering on page 7
• Memory ordering restrictions on page 8
2.1 Overview of memory types
In the ARMv7-M architecture, as implemented in the Cortex-M3 and Cortex-M4 processors,
and in the ARMv6-M architecture, as implemented in the Cortex-M0 and Cortex-M0+
processors, there are three mutually exclusive memory types specified. These are:
• Normal
•Device
• Strongly-ordered.
Typically, memory used for program code and for data storage is Normal memory. System
peripherals (I/O locations) generally conform to different access rules to Normal memory.
Examples of I/O accesses are:
• interrupt controller registers where an access can be used as an interrupt acknowledge,
changing the state of the controller
• memory controller configuration registers that are used to set up the timing and
correctness of areas of Normal memory
• memory mapped peripherals, where accessing a memory location can cause system
side-effects.
In ARMv7 including ARMv7-M, and in ARMv6-M regions of the memory map, accesses to
system peripherals are defined as Device or Strongly-ordered memory accesses, and are more
restrictive than accesses to Normal memory. That is:
• both read and write can cause system side-effects
• accesses must not be repeated, for example, on return from an exception
• the number, order, and sizes of the accesses must be maintained.
Within each memory type, the regions can be further divided by allocating different memory
attributes, such as, access permission and cacheability.
Strongly-ordered memory
The Strongly-ordered memory type defines memory locations where an access to the location
can cause system side-effects, or where the value returned for a load can vary depending on the
number of loads performed.
Examples of memory regions normally marked as being Strongly-ordered are memory-mapped
peripherals and I/O locations. In Cortex-M processors, the System Control Space (SCS) is
Strongly-ordered. This memory space covers the NVIC, MPU, SysTick timer and debug
components.
For explicit accesses from the processor to memory marked as Strongly-ordered:
• an access occurs in the programmed size
• the number of accesses is the number specified by the program.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 7
ID091712 Non-Confidential
An implementation must not perform more accesses to a Strongly-ordered memory location
than are specified by a simple sequential execution of the program, except as a result of an
exception occurring during load multiple and store multiple operations. For more information
see Exceptions in Load Multiple and Store Multiple operations in the ARMv7-M Architecture
Reference Manual (ARM DDI 0403).
Address locations in Strongly-ordered memory are not held in a cache, and are always treated
as Shareable memory locations, that is, the memory system will have to maintain coherency of
the data to permit the data to be shared by multiple processors.
All explicit accesses to Strongly-ordered memory must correspond to the ordering requirements
described in Memory ordering.
2.2 Memory ordering
The ARMv7-M and ARMv6-M architectures support a wide range of implementations, from
low-end microcontrollers through to high-end, superscalar, System on Chip (SoC) designs. To
do so, the architectures permit, and only mandate, a weakly-ordered memory model. This model
defines the three memory types, each with different properties and ordering requirements.
To support high-end implementations, the architecture does not require the ordering of
transactions between Normal and Strongly-ordered memory, and it does not mandate the
ordering of load/store instructions with respect to either instruction prefetch or instruction
execution.
The order of instructions in the program flow does not always guarantee the order of the
corresponding memory transactions. This is because:
• the processor can reorder some memory accesses to improve efficiency, providing this
does not affect the behavior of the instruction sequence
• the processor can have multiple bus interfaces
• memory or devices in the memory map can be on different branches of an interconnect
• some memory accesses are buffered or speculative.
When considering the memory ordering model at the application level, the key factor is that for
accesses to Normal memory, barriers are required, in some situations, where the order of
accesses must be controlled.
ARMv7-M and ARMv6-M define restrictions in the permitted ordering of memory accesses.
These restrictions depend on the memory attributes of the accesses.
The terms address dependency and control dependency are used in describing the memory
access ordering requirements.
Address dependency
An address dependency exists when the value returned by a read access is used to compute the
address of a subsequent read or write access. The address dependency exists even if the value
read by the first read access does not change the address of the second read or write access. This
might be due to the implementation of the processor’s interface, for example, if the value
returned is masked off before it is used, or if it has no affect on the predicted address value for
the second access.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 8
ID091712 Non-Confidential
Control dependency
A control dependency exists when the data value returned by a read access is used to determine
the condition code flags, and the values of the flags are evaluated to determine the address of a
subsequent read access. This address determination might be through conditional execution, or
through the evaluation of a branch.
2.3 Memory ordering restrictions
Table 3 shows the memory ordering between two explicit accesses A1 and A2, where A1 occurs
before A2 in program order. An access refers to a read or a write to the specified memory type.
For example, Device access, Non-shareable refers to a read or write access to Non-shareable
Device memory.
The meaning of the symbols used in Table 3 are:
< Accesses must be globally observed in program order, that is, A1 must be globally
observed strictly before A2.
- Accesses can be globally observed in any order provided that the requirements of
uniprocessor semantics are maintained, for example, respecting dependencies
between instructions in a single processor.
Note
Table 3 presents information from ARMv6-M Architecture Reference Manual, and Revision D
of the ARMv7-M Architecture Reference Manual. This differs from previous revisions of the
ARMv7-M architecture, but aligns with the current ARMv7-A/R architecture definition that
removes the ordering requirement between Strongly-ordered and Normal memory transactions.
This arises from the ability for Normal transactions to be executed speculatively, and provides
the capability for higher performance implementations to re-order Normal memory accesses
around a Strongly-ordered one unless explicitly prevented from doing so via barriers.
Table 3 Memory ordering restrictions
A2
Normal access
Device access,
Non-shareable
Device access,
Shareable
Strongly-ordered
access
A1 Normal access ----
Device access,
Non-shareable
-<-<
Device access,
Shareable
--<<
Strongly-ordered
access
-<<<

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 9
ID091712 Non-Confidential
The memory accesses in Table 3 on page 8 that are designated by the - symbol have the
following additional restrictions:
• If there is an address dependency then the two memory accesses are observed in program
order.
• This ordering restriction does not apply if there is only a control dependency between the
two read accesses.
• If there is an address dependency and a control dependency between two read accesses
the ordering requirements of the address dependency apply.
• If the value returned by a read access is used for a subsequent write access, then the two
memory accesses are observed in program order.
• An observer cannot view a write access to a memory location if that location would not
be written to in a sequential execution of a program. An example of an observer would be
a peripheral or a second processor.
• An observer cannot view a value written to a memory location if that value would not be
written in a sequential execution of a program.
The Cortex-M processors never perform memory accesses out of order compared to instruction
flow, however, the architecture does not prohibit this in future implementations. ARMv7-M
code written to be portable to ARMv7-AR processors, like Cortex-A9, must already take
account of this ordering model.
In Cortex-M processors, the memory types are linked to the memory map. A number of
architectural regions are defined and each has a predefined memory type. You can also change
some of the memory type definitions by programming the MPU when one is implemented.
It is possible to use the MPU on the Cortex-M processors to define an SRAM as a Device or
Strongly-ordered region, however, this reduces the performance and does not prevent the C
compiler from re-ordering the data transfers in the generated code. For best efficiency, ARM
recommends that SRAM is defined as Normal memory and you use memory barriers in
situations where memory ordering is important.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 10
ID091712 Non-Confidential
3 Memory barrier instructions
This section describes the available memory barrier instructions and their typical usage. The
section contains the following sub-sections:
• Overview
• Typical usages on page 11
• Architectural Requirements on page 11
• Architectural and implementation differences on page 14
• Cortex-M processor implementation specific requirements on page 14
• System implementation requirements on page 17
3.1 Overview
Memory barrier is the general term applied to an instruction, or sequence of instructions that
forces synchronization events by a processor with respect to retiring load/store instructions. A
memory barrier is used to guarantee:
• completion of preceding load and store accesses by the programmers’ model
• flushing of any prefetched instructions before the memory barrier event.
Both ARMv7-M and ARMv6-M architectures provide three explicit memory barriers to support
the memory order model. The memory barrier instructions are:
Data Memory Barrier (DMB)
Ensures that all explicit data memory transfers before the
DMB
are completed
before any subsequent data memory transfers after the
DMB
starts.
Data Synchronization Barrier (DSB)
Ensures that all explicit data memory transfer before the
DSB
are complete before
any instruction after the
DSB
is executed.
Instruction Synchronization Barrier (ISB)
Ensures that the effects of all context altering operations prior to the
ISB
are
recognized by subsequent instructions. This results in a flushing of the instruction
pipeline, with the instruction following the
ISB
being re-fetched.
In addition to the
ISB
instruction, the architecture defines exception entry and exception return
to also have
ISB
semantics, causing a fresh fetch of instructions and a re-evaluation of interrupts.
In C programming, barrier instructions can be generated using functions as defined in the Cortex
Microcontroller Software Interface Standard (CMSIS) or using intrinsic functions provided by
the various C compilers. The corresponding intrinsic functions are shown in Table 4.
Table 4 Memory barrier intrinsic
Memory Barrier CMSIS functions
C compiler intrinsic
a
Keil
MDK-ARM, DS-5 and RVDS
a. Input parameter
0xF
is used to specify a full system barrier operation.
DMB _DMB(); _dmb(0xF);
DSB _DSB(); _dsb(0xF);
ISB _ISB(); _isb(0xF);

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 11
ID091712 Non-Confidential
Note
Full system barrier operation ensures barrier operations for both read and write, and applies to
Inner and Outer Cacheable memory systems, and to Shareable and Non-shareable memories.
3.2 Typical usages
Typical usages of the three memory barrier instructions are described in the following sections.
Data Memory Barrier (DMB)
The
DMB
instruction ensures that all explicit data memory transfers before the
DMB
are completed
before any subsequent explicit data memory transactions after the
DMB
starts. This ensures
correct ordering between two memory accesses.
The use of
DMB
is rarely needed in Cortex-M processors because they do not reorder memory
transactions. However, it is needed if the software is to be reused on other ARM processors,
especially multi-master systems. For example:
• DMA controller configuration. A barrier is required between a CPU memory access and
a DMA operation.
• Semaphores in multi-core systems.
• Mailbox in multi-core systems.
In an application using CMSIS, you can use the
_DMB()
function to insert the
DMB
instruction.
Data Synchronization Barrier (DSB)
The
DSB
instruction ensures all explicit data transfers before the
DSB
are complete before any
instruction after the
DSB
is executed. In Cortex-M processors, it can be used to:
• ensure effects of an access to SCS take place before the next operation
• ensure memory is updated before the next operation, for example,
SVC
,
WFI
,
WFE
.
In an application using CMSIS, you can use
_DSB()
function to insert the
DSB
instruction.
Instruction Synchronization Barrier (ISB)
The
ISB
instruction flushes the pipeline in Cortex-M processors and ensures effects of all context
altering operations prior to the
ISB
are recognized by subsequent operations. It should be used
after the CONTROL register is updated.
In an applications using CMSIS, you can use the
_ISB()
function to insert the
ISB
instruction.
3.3 Architectural Requirements
To meet the architectural requirements, the memory barrier instructions might be required in a
number of situations.
System Control Space (SCS) Programming
The architecture defines the SCS as Strongly-ordered memory. In addition to the rules for the
behavior of Strongly-ordered memory, the architecture requires that the side-effects of any
access to the SCS that performs a context-altering operation take effect when the access
completes. Software can issue a
DSB
instruction to guarantee completion of a previous SCS
access.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 12
ID091712 Non-Confidential
The architecture guarantees the visibility of the effects of a context-altering operation only for
instructions fetched after the completion of the SCS access that performed the context-altering
operation. Executing an
ISB
instruction, or performing an exception entry or exception return,
guarantees the re-fetching of any instructions that have been fetched but not yet executed.
To guarantee that the side effects of a previous SCS access are visible, software can execute a
DSB
instruction followed by an
ISB
instruction.
When programming the MPU:
•Use a
DSB
instruction to ensure the effect of the update takes place immediately at the end
of context switching.
•Use an
ISB
instruction to ensure the new MPU setting takes effect immediately after
programming the MPU if the MPU configuration code was accessed using a branch or
call. If the effects of the MPU configuration are not required until after an exception
return, then the exception return can be used in place of an explicit
ISB
.
The programming of interrupt priorities and enables can be done while all of the interrupts are
disabled. This can be achieved by setting PRIMASK before the set up takes place and then
clearing PRIMASK after the set up is complete. Follow the
CPSIE
/
MSR
with an
ISB
to ensure the
recognition of the set up for subsequent instructions.
When dynamically changing an exception’s priority include a
DSB
after the store to ensure that
the result is visible.
A
DSB
should be used after programming control registers, such as the System Control Register
(SCR), when the side-effect is needed immediately. For example, a
DSB
is needed between the
write to the SCS and the next operation if:
• the SLEEPDEEP setting in the SCR is changed, followed by either:
— enter sleep with
WFI
/
WFE
— an exception exit, with Sleep-on-exit enabled.
• the SLEEPONEXIT setting in the SCR is changed just before an exception exit.
CPS and MSR instructions
In addition to barriers, the
CPSID
instruction is also self synchronizing within the instruction
stream, and ensures that the effect of setting PRIMASK and/or FAULTMASK is visible on the
following instruction, thus ensuring that the appropriate interrupt/exceptions are disabled.
CPSIE
that performs interrupt enabling is not guaranteed to be self synchronizing, with the
architecture guaranteeing the recognition of the change only following an
ISB
. The same is true
for
MSR
to CONTROL for stack-pointer selection and privilege level.
CONTROL updates
When writing to the CONTROL register, an
ISB
instruction should be used to ensure the new
configuration is used in subsequent instructions’ operations. For example, this will ensure that
the subsequent instructions are re-fetched with the correct privilege information if
MSR
is used to
switch between privilege and user modes.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 13
ID091712 Non-Confidential
Sleep
It is not a requirement for the processor hardware to drain any pending memory activity before
suspending execution to enter a sleep mode. Therefore, software has to handle this by adding
barrier instructions if the sleep mode used could affect data transfer. A
DSB
should be used to
ensure that there are no outstanding memory transactions prior to executing the
WFI
or
WFE
instruction.
Vector table changes
If the program changes an entry in the vector table, and then enables the corresponding
exception, a
DSB
instruction should be used between these two operations. This ensures that if
the exception is taken after being enabled the processor uses the new exception vector. If the
updated vector table is required immediately, for example if an
SVC
immediately follows an
update to the SVC table entry via a store, then a
DSB
is also required.
Self modifying code
If a program contains self-modifying code, use a
DSB
instruction followed by an
ISB
instruction
immediately after the code modification in the program. This ensures that the update completes
and that the subsequent instruction execution uses the updated program. If the code is only
required after an exception return then the exception return itself is sufficient.
Memory Map modifications
If the system contains a memory map switching mechanism then use a
DSB
instruction after
switching the memory map in the program. This ensures subsequent instruction execution uses
the updated memory map, if the memory system makes the updated memory map visible to all
subsequent memory accesses.
Note
An
ISB
or an exception entry/return is required to ensure that the subsequent instructions are
fetched using the new memory map.
Semaphores in a multi-master system
Two accesses to differing addresses in normal memory, or to different devices in Device
memory, or to two different memory types, with the exception of those that Table 3 on page 8
shows, are not guaranteed to be ordered. If the order of any of these transactions is required for
the purpose of semaphore communication in a multi-master system then a
DMB
instruction must
be inserted, for example, between a payload and spin-lock.
External factors
It cannot be guaranteed that the memory barrier instruction knows the status of an access outside
of the processor. If the access on the bus completes, but the effects are not immediate, then a
DMB
/
DSB
can complete before the effects take place. This could happen, for example, if there are
write buffers in the system. The architecture does not specify the time for a peripheral to make
the side-effects of a read or write visible to the system. If required, it is the responsibility of the
system designer to provide a means of ensuring the update has taken place, for example, via a
read.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 14
ID091712 Non-Confidential
3.4 Architectural and implementation differences
Although the architecture permits memory re-ordering to happen in many cases, in practice, the
majority of simple processors do not re-order memory transfers. As a result, there is a difference
in the requirements of the architecture and the processor’s implementation requirements. For
example, most application programs can run correctly on existing Cortex-M processors without
using any memory barrier instructions, although the architecture requires the use of memory
barriers in some situations. Also, in most scenarios the applications are not sensitive to the affect
of missing memory barriers.
However, if the application is to be ported to high-end processors, the omission of memory
barrier instructions might result in glitches in the applications. The use of memory barriers can
also be important if the software will be ported to a system with multiple processors. For
example, when handling semaphores in a multiple processor system, memory barrier
instructions should be used to ensure the other processors in the system can observe the data
changes in the correct order.
Note
ARM recommends software developers to develop software based on architectural
requirements rather than processor specific behaviors. This ensures portability and reusability
of the software code. Processor specific behaviors might also vary between different released
versions.
3.5 Cortex-M processor implementation specific requirements
The Cortex-M processor type can affect memory ordering.
Cortex-M3 and Cortex-M4 implementations
The Cortex-M3 and Cortex-M4 processors implement the ARMv7-M architecture. Both
processors have three stage pipelines, an optional MPU, and have multiple AHB Lite interfaces.
Code that follows the ARMv7-M barrier and ordering rules is guaranteed to function on
Cortex-M3, Cortex-M4 and all other ARMv7-M compliant implementations. The Cortex-M3
and Cortex-M4 ordering model is at the simpler end of a permitted ARMv7-M implementation
and so, although ARM recommends that barriers are always implemented, it is possible to
implement software without barriers in a number of cases because:
• all loads and stores always complete in program order, even if the first is buffered
• all Strongly-ordered load/stores are automatically synchronized to the instruction stream
• at most, one instruction plus a folded IT instruction executes at one time
• interrupt evaluation is performed on every instruction, except on the folded IT
• interrupt evaluation is performed between a
CPSIE
instruction and a following
CPSID
instruction
• NVIC side-effects complete less than two instructions after an NVIC load or store
• the maximum prefetch size is six instructions, plus a fetch of two instructions in progress
on the bus
• Device and Normal load/stores may be pipelined
•
MSR
side-effects are visible after one further instruction is executed.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 15
ID091712 Non-Confidential
This simple implementation results in a reduced need for barriers in a number of situations when
code is only intended to run on Cortex-M3 or Cortex-M4. All use of
DMB
is redundant due to the
inherent ordering of all loads and stores on Cortex-M3 and Cortex-M4.
Both the ARM Cortex-M3 and Cortex-M4 implement optional bit-banding. Accesses to the
bit-band alias, and associated bit-band region on these two processors, do not require an
intervening
DMB
instruction.
Due to the instruction buffers in the Cortex-M3 and Cortex-M4, the pipeline operations are
different from traditional RISC processors:
• up to two instructions can be fetched in one cycle because most instructions are 16-bit
• an instruction can be fetched several cycles ahead of the decode and execution stages.
Figure 2 shows an example Cortex-M3, Cortex-M4 pipeline scenario.
Figure 2 Pipeline stages in the Cortex-M3 and Cortex-M4 processors
More details about the Cortex-M3 and Cortex-M4 specific behaviors are covered in
Case-by-case details on page 20.
Cortex-M0 implementation
The ARM Cortex-M0 implements the ARMv6-M architecture. It has a three stage pipeline, and
a single AHB Lite interface. Code that follows the ARMv6-M barrier and ordering rules is
guaranteed to function on the Cortex-M0, Cortex-M0+, Cortex-M3, Cortex-M4, and all other
ARMv6-M/ARMv7-M compliant implementations. The Cortex-M0 ordering model is at the
simpler end of a permitted ARMv7-M implementation and so, although ARM recommends that
barriers are always implemented, it is possible to implement software without barriers in a
number of cases because:
• all loads and stores always complete in program order
• all Strongly-ordered load/stores are automatically synchronized to the instruction stream
• interrupt evaluation is performed on every instruction
• interrupt evaluation is performed between a
CPSIE
instruction and a following
CPSID
instruction
• NVIC side-effects complete after less than two instructions following an NVIC load or
store
Inst 1
Inst 2
Inst 3fetch decode
fetch decode
fetch decode
Instruction 1
Instruction 2
Instruction 3
Up to two instructions can be fetched in
one transfer. (16-bit instructions)
Inst 4fetch decode
Instruction 4
Instruction fetch can happen several
cycles before decode and execution
execution
ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 16
ID091712 Non-Confidential
• the maximum prefetch size is two instructions, plus a fetch of two instructions in progress
on the bus
• Device and Normal load/stores may be pipelined
•
MSR
side-effects are visible after one further instruction is executed.
This simple implementation results in a reduced need for barriers in a number of situations when
code is only intended to ever run on the Cortex-M0. All use of
DMB
is redundant due to the
inherent ordering of all loads and stores on the Cortex-M0.
Different from the Cortex-M3 and Cortex-M4, the Cortex-M0 has a smaller instruction buffer.
However, it can also fetch up to two instructions in a cycle.
Figure 3 shows an example Cortex-M0 pipeline scenario.
Figure 3 Pipeline stages in the Cortex-M0 processor
More details about the Cortex-M0 specific behaviors are covered in Case-by-case details on
page 20.
Cortex-M0+ implementation
The ARM Cortex-M0+ implements the ARMv6-M architecture. It has a two stage pipeline, and
an AHB Lite interface and an optional IOPORT interface. Code that follows the ARMv6-M
barrier and ordering rules is guaranteed to function on the Cortex-M0, Cortex-M0+, Cortex-M3,
Cortex-M4 and all other ARMv6-M/ARMv7-M compliant implementations. The Cortex-M0+
ordering model is at the simpler end of a permitted ARMv7-M implementation and so, although
ARM recommends that barriers are always implemented, it is possible to implement software
without barriers in a number of cases because:
• all loads and stores always complete in program order
• all Strongly-ordered load/stores are automatically synchronized to the instruction stream
• interrupt evaluation is performed on every instruction
• interrupt evaluation is performed between a
CPSIE
instruction and a following
CPSID
instruction
• NVIC side-effects complete after less than two instructions following an NVIC load or
store
• the maximum prefetch size including instructions fetching on the bus is two
• Device and Normal load/stores may be pipelined
•
MSR
side-effects are visible after one further instruction is executed.
Inst 1
Inst 2
Inst 3fetch decode
fetch decode
fetch decode
Instruction 1
Instruction 2
Instruction 3
Up to two instructions can be fetched in
one transfer. (16-bit instructions)
Inst 4fetch decode
Instruction 4
execution

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 17
ID091712 Non-Confidential
This simple implementation results in a reduced need for barriers in a number of situations when
code is only intended to ever run on the Cortex-M0+. All use of
DMB
is redundant due to the
inherent ordering of all loads and stores on the Cortex-M0+.
The Cortex-M0+ has a smaller instruction buffer than the Cortex-M0, Cortex-M3, and
Cortex-M4 processors.
Figure 4 shows an example Cortex-M0+ pipeline scenario.
Figure 4 Pipeline stages in the Cortex-M0+ processor
3.6 System implementation requirements
As well as memory ordering at the processor level, system level design can also affect memory
ordering and might require extra steps to ensure correctness of the program operations.
Write buffers
Write buffers might be present within the processor, or can be present in bus components, such
as AHB to APB bridges, or memory interfaces. The advantage of a write buffer is that it can
enhance system performance. By using a write buffer, during a memory write, subsequent
instructions can be executed without waiting for the write operation to be completed.
Figure 5 shows locations where write buffers might be used and their effect.
Figure 5 Locations where write buffers might be used and their effect
Inst 1
Inst 2
Inst 3fetch
fetch
fetch
Instruction 1
Instruction 2
Instruction 3
Up to two instructions can be fetched in
one transfer. (16-bit instructions)
Inst 4fetch
Instruction 4
execution
Store
instruction
CPU
(e.g. Cortex-M3)
Bridge
System bus
Peripheral bus
Device
Actual data transfer on system bus
Write buffers
Actual data transfer on peripheral bus
Time
Memory
Subsequent instructions
With write buffers, the processor can continue program
execution without waiting for the write to be completed

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 18
ID091712 Non-Confidential
When a write buffer is present, it is possible to start another data transfer while the first one is
still taking place. This might result in an error if the subsequent operations on the processor rely
on the completion of the buffered write. In typical memory or peripheral accesses on the
Cortex-M processors this is not a problem, because data can only be accessed with one bus path
and no bus transaction reordering can take place within the bus system. But if the interaction
between the two memory operations can be dependent in other ways, additional measures might
be needed to ensure correct ordering of the operations.
The memory barrier instructions,
DMB
and
DSB
, can be used to ensure that the write buffer on the
processor has completed its operation before subsequent operations can be started. However, it
does not check the status of the bus level write buffers. In such cases, if the system is based on
AHB or AHB Lite, you might need to perform a dummy read through the bus bridge to ensure
that the bus bridge has completed its operation. Alternatively, a SoC design might have a device
specific status register to indicate whether the bus system write buffer is idle.
Note
The Cortex-M0 processor (r0p0) and the Cortex-M0+ processor (r0p0) do not include a write
buffer in their processor bus interface.
System level cache
The Cortex-M0, Cortex-M0+, Cortex-M1, Cortex-M3, and Cortex-M4 processors do not have
any internal cache memory. However, it is possible for a SoC design to integrate a system level
cache.
Note
A small caching component is present in the Cortex-M3 and Cortex-M4 processors to accelerate
flash memory accesses during instruction fetches.
In a single processor system, the existence of a data cache is unlikely to cause a memory
ordering issue, however, it might have implications for power saving modes. If there are
multiple bus masters in the system, and if a data set is shared, then cache memory control and
memory barriers will be required to ensure correct memory ordering is maintained. This is
because a cache unit can re-order the update sequence of memory.
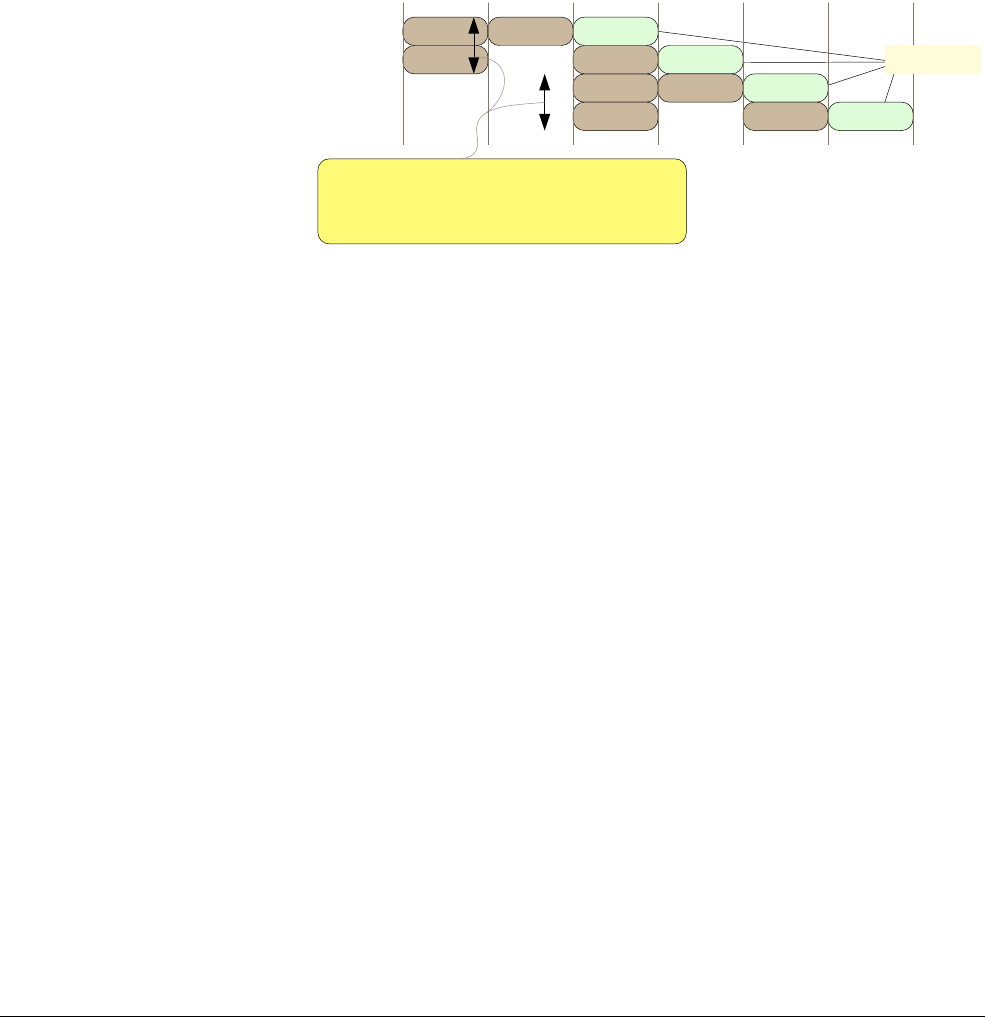
Figure 6 shows the reordering of a memory update sequence due to a cache component.
Figure 6 Reordering of a memory update sequence due to a cache component
CPU A
cache
System bus
Memory
CPU B
Time
Store A
Processor A transfers
Store B
Memory update sequence by
cache write through
Store B Store A
A
B B’
A’
Values
observed by
CPU B

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 19
ID091712 Non-Confidential
Note
If multiple cache units are present, you will also require cache coherency support. Alternatively,
data that is shared can be located in non-cacheable memory regions.
Hardware latency
Software errors or race conditions can also be caused by latency in hardware designs. Examples
of hardware latency are the delay:
• between triggering interrupt generation at a peripheral by a memory access, to the time
the processor actually received the interrupt
• between enabling the clock to a peripheral, to the time the peripheral can be safely
accessed
• after switching memory map by writing to a system memory control register, to the time
that the new memory map arrangement becomes valid.
Note
These cannot be resolved using memory barrier instructions and should be addressed during
device specification.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 20
ID091712 Non-Confidential
4 Case-by-case details
This section describes the use of memory barriers in the Cortex-M processors on a case-by-case
basis, it includes the following sub-sections:
• Normal data access in memories
• Device (Peripheral) access
• Bit band access on page 21
• SCS peripheral accesses on page 21
• Enabling Interrupts using NVIC on page 24
• Disabling Interrupts using NVIC on page 27
• Enabling interrupts using CPS instructions and MSR instructions on page 28
• Disabling interrupts using CPS and MSR instructions on page 31
• Disabling interrupts at peripherals on page 32
• Changing priority level of an interrupt on page 33
• Vector table configuration - Vector Table Offset Register (VTOR) on page 36
• Vector table configuration on page 37
• Memory map change on page 39
• Entering sleep modes on page 41
• Self-reset on page 42
• CONTROL register on page 45
• MPU programming on page 46
• Multi-master systems on page 47
• Semaphores and Mutual Exclusives (Mutex) - unicore and multicore on page 49
• Self modifying code on page 50.
4.1 Normal data access in memories
There is no need to use a memory barrier instruction between each access:
• Architecturally: A processor is allowed to re-order the data transfers as long as it does not
affect the operation of the program.
• Implementation: In the Cortex-M processors data transfers are carried out in the
programmed order.
4.2 Device (Peripheral) access
There is no need to use a memory barrier instruction between each step during peripheral
programming or peripheral access:
• Architecturally: Access to the same device must be in the programmed order.
• Implementation: Cortex-M processors do not reorder data transfers.
If the programming sequence involves a number of different devices:
• Architecturally: A memory barrier is required when a different device is accessed and the
programming order between the two devices can affect the result. This is because the bus
structure might have different bus paths to each device and the bus paths might have
different delays.
• Implementation: Cortex-M processors do not re-order data transfers and so do not require
a memory barrier when a different device is accessed.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 21
ID091712 Non-Confidential
4.3 Bit band access
The bit band on the Cortex-M3 and Cortex-M4 processors is an implementation specific feature.
It enables two parts of the memory map to be bit addressable by providing two bit band alias
regions that enable bit data accesses:
• Architecturally: The bit band feature is not part of the ARMv7 or ARMv6 architectures,
so there are no architecturally defined requirements on using memory barriers with bit
band accesses.
• Implementation: The Cortex-M3 and Cortex-M4 processors handle bit band accesses, to
bit band regions as well as bit band alias regions, in programmed order. There is no need
to use a memory barrier.
The ARM Cortex-M0 and Cortex-M0+ processors do not have the bit band feature. It is possible
to use a bus wrapper to add the bit band feature to the Cortex-M0 and Cortex-M0+ processors.
In this case, the bus wrapper must retain correct memory ordering.
4.4 SCS peripheral accesses
SCS peripheral accesses, for example, NVIC and debug accesses, generally do not require the
use of memory barrier instructions: There is no need to insert memory barrier instructions
between each SCS access, or between an SCS access and a Device memory access.
• Architecturally: SCS is Strongly-ordered, and already exhibits the
DMB
behavior.
• Implementation: There is no need to insert memory barrier instructions between each SCS
access, or between an SCS access and a Device memory access.
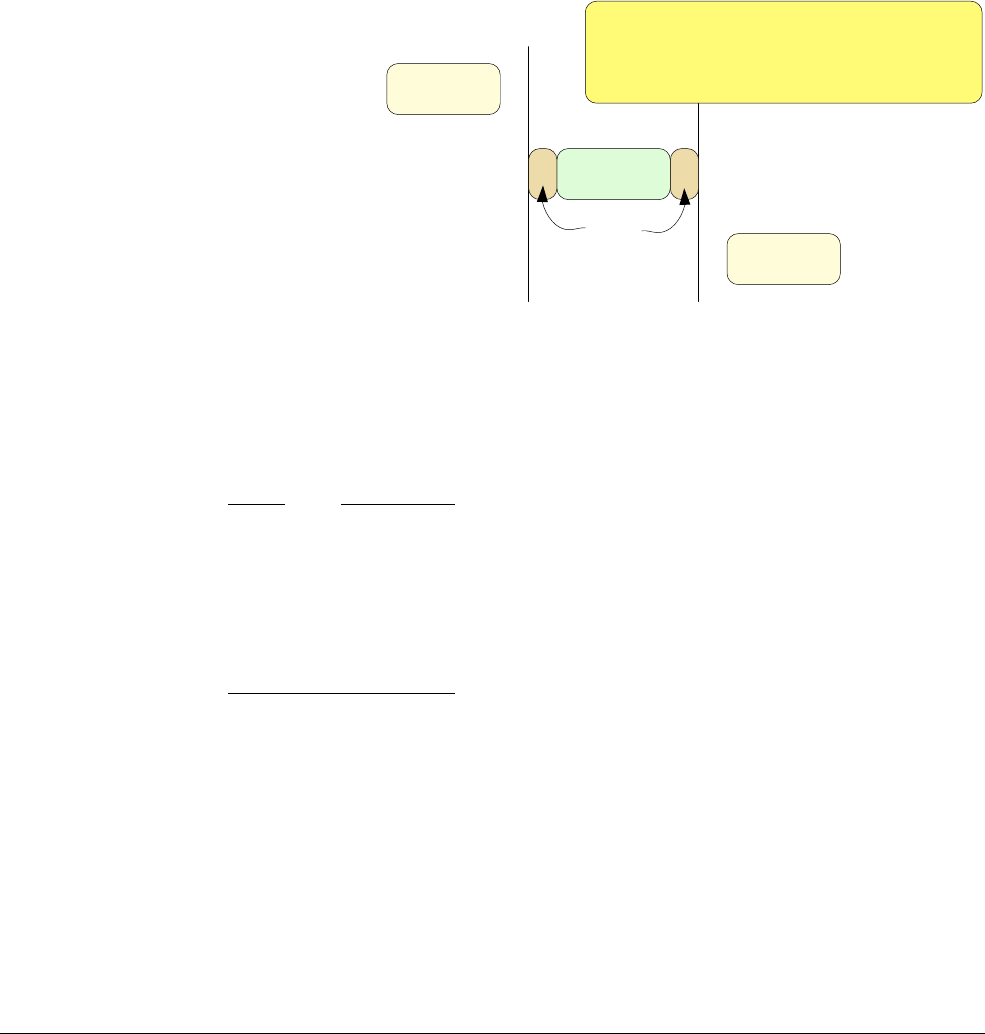
Figure 7 shows the architectural SCS access behavior.
Figure 7 Architectural SCS access behavior
Instruction N-1
Instruction N
Instruction N+1
Instruction
N-1
Access to
SCS
DMB
Each access to SCS (including NVIC) has
the side effect of DMB with regards to
device / strongly ordered accesses
Access to
SCS
DMB

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 22
ID091712 Non-Confidential
Architectural requirements
ARM recommends that the architectural requirements are adopted.
• if the effect of the SCS register-write needs to be visible immediately, a
DSB
is required
• there is no need to add memory barrier instructions between steps when programming a
SCS device
• if the software requires that the next operation must not be carried out until the effect of
the access has taken place, a
DSB
instruction must be used as shown in Example 1.
Example 1 Ensuring the effect of an SCS register-write is visible immediately
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk; /* Enable deepsleep */
__DSB(); /* Ensure effect of last store takes effect */
__WFI(); /* Enter sleep mode */
Or
void Device_IRQHandler(void) {
software_flag = 1; /* Update software variable used in thread */
SCB->SCR &= ~SCB_SCR_SLEEPONEXIT_Msk; /* Disable sleeponexit */
__DSB(); /* Ensure effect of last store takes effect */
return; /* Exception return */}
Note
The
DMB
side-effect of SCS access does not ensure memory ordering when the program access
is to Normal memory. If the program operation relies on the ordering between an access to a
SCS location, and another access to a Normal memory location, then a memory barrier
instruction like
DMB
or
DSB
is required. Example 2 shows representative code for ordering
accesses to SCS and Normal memory.
Example 2 Ensuring an access to SCS and Normal memory locations is ordered
STR R0, [R1] ; Access to a Normal Memory location
DMB ; Add DMB ensures ordering for ALL memory types
STR R3, [R2] ; Access to a SCS location
DMB ; Add DMB ensures ordering for ALL memory types
STR R0, [R1] ; Access to a Normal Memory location
For the same code, if
[R1]
is pointing to a Device or Strongly-ordered memory region, then the
DMB
is not required.
ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 23
ID091712 Non-Confidential
Implementation requirements
In existing Cortex-M processors, omission of the
DMB
, or a
DSB
instruction in Example 2 on
page 22 does not cause an error because the SCS in these processors contains
DSB
behavior
already:
• In Cortex-M0, M0+ processors, the effect takes place immediately after the access
completes.
DSB
is not strictly required after SCS accesses.
• In Cortex-M3 and M4 processors, the effect takes place immediately after the access
completes.
DSB
is not strictly required after SCS accesses, accept for the special case of a
SLEEPONEXIT update. See Special case for the Cortex-M3 and Cortex-M4 processors.
Figure 8 shows the implemented SCS access behavior.
Figure 8 Implemented SCS access behavior
Therefore Example 1 on page 22 can be simplified by omitting the
DSB
instruction without any
resultant error, that is:
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk; /* Enable deepsleep */
__WFI(); /* Enter sleep mode */
Note
• The existing Cortex-M processors do not reorder any data transfers. As a result there is no
need to use a
DMB
instruction.
• For the Cortex-M3 and Cortex-M4 processor, if the instruction after the SCS load/store is
a
NOP
instruction, or a conditional instruction with condition failed (
cc’failed
), the
NOP
instruction or
cc’failed
instruction could execute in parallel to the SCS load/store
instruction.
Special case for the Cortex-M3 and Cortex-M4 processors
If an exception handler disables the SLEEPONEXIT feature just before an exception return, a
DSB
instruction is needed after the SCR write, before the exception return.
Instruction N-1
Instruction N
Instruction N+1
Instruction
N-1
Access to
SCS
DSB
Each access to SCS (including NVIC) has
the side-effect of DSB with regards to
Device/Strongly-ordered accesses
Instruction
N+1
(e.g. LDR/STR to SCS)

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 24
ID091712 Non-Confidential
4.5 Enabling Interrupts using NVIC
Normally NVIC operations do not require the use of memory barrier instructions.
Example 3 shows example NVIC operations code.
Example 3 NVIC operations code
device_config(); // Setup peripheral
NVIC_ClearingPending(device_IRQn); // clear pending status
NVIC_SetPriority(device_IRQn, priority); // set priority level
NVIC_EnableIRQ(device_IRQn); // Enable interrupt
Note
Interrupts can enter pending state before they are enabled.
Architecturally, each SCS access has
DMB
behavior with regard to other Device or
Strongly-ordered accesses.
Figure 9 shows the architectural NVIC access behavior.
Figure 9 Architectural NVIC access behavior
In existing Cortex-M processor implementations, each SCS access has
DSB
instruction behavior
with regard to other Device or Strongly-ordered accesses.
device_config();
NVIC_ClearPending(device_IRQn);
NVIC_SetPriority(device_IRQn, priority);
NVIC_EnableIRQ(device_IRQn);
Access to
device
Access to
SCS
DMB
Access to
SCS
DMB
Access to
SCS
DMB
Each access to NVIC (or System
Control Space) has the side
effect of DMB with regard to
device / strongly ordered
accesses

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 25
ID091712 Non-Confidential
Figure 10 shows the implemented NVIC access behavior.
Figure 10 Implemented NVIC access behavior
For existing Cortex-M processors, due to the pipelined nature of the processor, if an interrupt
was already in the pending state, the processor can execute up to two extra instructions after
enabling the interrupt in the NVIC before executing the interrupt service routine.
Figure 11 shows that after a pended interrupt is enabled, the Cortex-M processors might execute
additional instructions before entering the exception handler.
Figure 11 Implemented interrupt enabling delay in Cortex-M processors
Architectural requirements
ARM recommends that the architectural requirements are adopted.
Depending on the requirements in your application:
• memory barriers are not required for normal NVIC programming
• memory barriers are not required between NVIC programming and peripheral
programming
• if a pended interrupt request needs to be recognized immediately after being enabled in
the NVIC, add a
DSB
instruction and then an
ISB
instruction.
If the instruction after the interrupt depends on the result of the pended interrupt, then you
should add memory barrier instructions.
device_config();
NVIC_ClearPending(device_IRQn);
NVIC_SetPriority(device_IRQn, priority);
NVIC_EnableIRQ(device_IRQn);
Access to
device
Access to
SCS
DSB
Access to
SCS
DSB
Access to
SCS
DSB
Each access to NVIC (or System
Control Space) has the side
effect of DSB with regard to
device / strongly ordered
accesses
STR R0, [R1] ; Enable IRQ by writing to NVIC_SETENA
... ; Interrupt is in pending state
... ; Instruction N+1
... ; Instruction N+2
... ; Instruction N+3
Pended interrupt
service routine
might execute here
ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 26
ID091712 Non-Confidential
Example 4 shows code for handling an interrupt.
Example 4 Interrupt handling code
LDR R0, =0xE000E100 ; NVIC_SETENA address
MOVS R1, #0x1
STR R1, [R0] ; Enable IRQ #0
DSB ; Ensure write is completed
; (architecturally required, but not strictly
; required for existing Cortex-M processors)
ISB ; Ensure IRQ #0 is executed
CMP R8, #1 ; Value of R8 dependent on the execution
; result of IRQ #0 handler
If the memory barrier instructions are omitted, then the CMP instruction is executed before the
interrupt has taken place.
Figure 12 shows how a program error might be introduced if the program expects the interrupt
to take place immediately.
Figure 12 Program error due to the interrupt not taking place immediately
To prevent a program error, application code that relies on immediate recognition of the
interrupt must have the memory barrier instructions added.
Implementation requirements
Depending on the requirements in your application:
• memory barriers are not required for normal NVIC programming
• if a pended interrupt request must be recognized immediately after being enabled in the
NVIC, add an
ISB
instruction.
Note
Since a NVIC access already has
DSB
instruction behavior, omitting the
DSB
instruction still
permits an enabled and pended interrupt to be recognized immediately.
CPSIE I
CMP R8, #0
BEQ label
CPSIE I
CMP
Pended interrupt takes
place here, if any
Interrupt
enabled
NVIC recognizes
the interrupt
CPU pipeline
accepts the request
BEQ
Compare instruction
uses the value of R8
before interrupt has
taken place

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 27
ID091712 Non-Confidential
4.6 Disabling Interrupts using NVIC
In common application scenarios there is no need to use memory barriers. For example:
NVIC_EnableIRQ(device_IRQn); // Disable interrupt
Due to the processor pipeline, the Cortex-M processors can be entering the interrupt sequence
at the same time as writing to the NVIC to disable the interrupt. Therefore, it is possible that an
interrupt handler might be executed immediately after it is disabled at the NVIC.
Figure 13 shows the implemented interrupt disabling delay in Cortex-M processors.
Figure 13 Implemented interrupt disabling delay in Cortex-M processors
Architectural requirement
ARM recommends that the architectural requirement is adopted.
Depending on the requirements in your application:
• memory barriers are not required for normal NVIC programming when disabling an IRQ
• memory barriers are not required between NVIC programming and peripheral
programming
• if it is necessary to ensure an interrupt will not be triggered after disabling it in the NVIC,
add a
DSB
instruction and then an
ISB
instruction.
Example 5 shows example code for changing an interrupt vector.
Example 5 Changing an interrupt vector
#define MEMORY_PTR(addr) (*((volatile unsigned long *)(addr)))
NVIC_DisableIRQ(device_IRQn); // Disable interrupt
__DSB();
__ISB();
MEMORY_PTR(SCB->VTOR+0x40+(device_IRQn<<2))=
(void) device_Handler; // Change vector to a different one
Implementation requirements
Depending on the requirements in your application:
• memory barriers are not required for normal NVIC programming when disabling an IRQ
• memory barriers are not required between NVIC programming and peripheral
programming
• if it is necessary to ensure an interrupt will not be triggered after disabling it in the NVIC,
add an
ISB
instruction.
STR R0, [R1] ; Disable IRQ by writing to NVIC_CLRENA
... ; Interrupt is happening
... ; Instruction N+1
... ; Instruction N+2
... ; Instruction N+3
Pended interrupt
service routine
might execute here

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 28
ID091712 Non-Confidential
4.7 Enabling interrupts using CPS instructions and MSR instructions
In normal applications there is no need to add any barrier instruction after using a
CPS
instruction
to enable an interrupt:
_enable_irq(); /* Compiles to “CPSIE I” - Clear PRIMASK */
If an interrupt was already in the pending state, the processor accepts the interrupt after the
“
CPSIE I
” is executed. However, additional instructions can be executed before the processor
enters the exception handler:
• for Cortex-M3 or Cortex-M4, the processor can execute up to TWO additional
instructions before entering the interrupt service routine
• for Cortex-M0, the processor can execute up to ONE additional instruction before
entering the interrupt service routine.
Figure 14 shows the implemented interrupt enabling delay in the Cortex-M3 and Cortex-M4
processors.
Figure 14 Implemented interrupt enabling delay in the Cortex-M3 and Cortex-M4 processors
Figure 15 shows the implemented interrupt enabling delay in the Cortex-M0 and Cortex-M0+
processors.
Figure 15 Implemented interrupt enabling delay in the Cortex-M0 and Cortex-M0+ processors
CPSIE I ; Enable IRQ by clearing PRIMASK
... ; Interrupt change to pending state
... ; Instruction N+1
... ; Instruction N+2
... ; Instruction N+3
Cortex-M3/M4:
Pended interrupt
service routine
might execute here
CPSID I ; Disable IRQ by setting PRIMASK
CPSIE I ; Enable IRQ by clearing PRIMASK
... ; Interrupt change to pending state
... ; Instruction N+1
... ; Instruction N+2
... ; Instruction N+3
Cortex-M0:
Pended interrupt
service routine
might execute here
CPSID I ; Disable IRQ by setting PRIMASK

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 29
ID091712 Non-Confidential
Architectural requirements
ARM recommends that the architectural requirements are adopted.
• If it is necessary to ensure a pended interrupt is recognized before subsequent operations,
the
ISB
instruction should be used after
CPSIE I
. Figure 16 shows the use of the
ISB
instruction after enabling interrupts to permit immediate recognition of the pending
interrupt.
• If it is not necessary to ensure that a pended interrupt will be recognized immediately
before subsequent operations, it is not necessary to insert a memory barrier instruction.
• Between two time critical tasks, if you want to permit a pended interrupt to take place, you
can use an
ISB
instruction as follows:
__enable_irq(); // CPSIE I : Enable interrupt
__ISB(); // Allow pended interrupts to be recognized
__disable_irq(); // CPSID I : Disable interrupt
Figure 16 shows the resulting behavior.
Figure 16 Use ISB after enabling interrupts to permit immediate recognition of a pending interrupt
A suitable architectural coding is:
CPSIE I
ISB
Instr N
critcial_task_1();
CPSIE I
ISB
Instr N
Pended interrupt takes
place here, if any
Interrupt
enabled
NVIC recognize
the interrupt
CPU pipeline
accept the request
__enable_irq(); /* CPSIE I */
critical_task1(); /* Time critical task 1 */
__disable_irq(); /* CPSID I */
__enable_irq(); /* CPSIE I */
critical_task2(); /* Time critical task 2 */
__disable_irq(); /* CPSID I */
__ISB();
Interrupt can take place here

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 30
ID091712 Non-Confidential
Figure 17 shows the resulting behavior.
Figure 17 Architectural interrupt behavior between CSPIE and CPSID
Note
The same requirement applies when using the
MSR
instruction to enable interrupts.
Implementation requirements
In Cortex-M processors:
• If it is necessary to ensure a pended interrupt is recognized before subsequent operations,
the
ISB
instruction should be used after
CPSIE I
. This is the same as the architectural
requirement, see Figure 16 on page 29.
• If it is not necessary to ensure that a pended interrupt is recognized immediately before
subsequent operations, it is not necessary to insert a memory barrier instruction.
• An exception to this rule is the sequence
CPSIE
followed by
CPSID
. In Cortex-M processors,
there is no need to insert an
ISB
between
CPSIE
and
CPSID
.
A suitable implementation coding is:
CPSIE I
ISB
CPSID I
critcial_task_1();
critcial_task_2();
CPSIE I
ISB
CPSID I
Pended interrupt takes
place here, if any
Interrupt
enabled
NVIC recognize
the interrupt
CPU pipeline
accept the request
__enable_irq(); /* CPSIE I */
critical_task1(); /* Time critical task 1 */
__disable_irq(); /* CPSID I */
__enable_irq(); /* CPSIE I */
critical_task2(); /* Time critical task 2 */
__disable_irq(); /* CPSID I */
Interrupt can take place here

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 31
ID091712 Non-Confidential
Figure 18 shows the implemented behavior.
Figure 18 Implemented behavior requires no ISB between CPSIE and CPSID
Note
As the implementation requirements show, there is no need to add a memory barrier instruction
between
__enable_irq()
and
__disable_irq()
. However, in the architecture, if the interrupt
needs to be recognized between the
CPSIE
and
CPSID
instructions, then an
ISB
instruction is
needed. The same applies when using the
MSR
instruction to enable interrupts.
4.8 Disabling interrupts using CPS and MSR instructions
The
CPSID
instruction is self-synchronized to the instruction stream and there is no requirement
to insert memory barrier instructions after
CPSID
.
Architectural requirements
ARM recommends that these architectural requirements are adopted.
Memory barrier instruction is not required.
Implementation requirements
Memory barrier instruction is not required.
Note
The same applies when using a
MSR
instruction to disable interrupts.
CPSIE I
CPSID I
critcial_task_1();
critcial_task_2();
CPSIE I
CPSID I
Pended interrupt takes
place here, if any
Interrupt
enabled
NVIC recognize
the interrupt
CPU pipeline
accept the request

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 32
ID091712 Non-Confidential
4.9 Disabling interrupts at peripherals
Disabling of an interrupt at a peripheral might take additional time because of the various
possible sources of delay in the system.
Figure 19 shows various sources of delay.
Figure 19 Various sources of delay during interrupt disabling
You might receive an interrupt request from a disabled peripheral, for a short period of time,
immediately after the peripheral is disabled.
Architectural requirements
IMPLEMENTATION DEFINED, there are no architectural requirements.
Implementation requirements
The delay is device dependent. For most cases, if the delay in the IRQ synchronizer is small,
you can use the sequence:
1. Disable the peripheral interrupt by writing to its control register.
2. Read back the control register of the peripheral to ensure it has been updated.
3. Disable the IRQ in the NVIC.
4. Clear the IRQ pending status in the NVIC.
5. Read back the IRQ pending status. If IRQ pending is set, clear the IRQ status at the
peripheral, and clear the IRQ pending status in the NVIC again. This step must be
repeated until the NVIC IRQ pending status remains cleared.
Processor
Write buffer
Memory
AHB to APB
bridge
Write buffer
Peripheral Peripheral
Cross clock
domain
syncrhonizer
IRQ
IRQ
Delay in
write
buffer
Write to
peripheral
Delay in
peripheral
Delay in
synchronizer

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 33
ID091712 Non-Confidential
This sequence will successfully disable interrupts for most of the simple microcontroller
devices. However, due to the various delay factors that might occur within the system, ARM
recommends you contact your chip supplier or manufacturer to get definitive recommendations.
4.10 Changing priority level of an interrupt
The priority level settings are determined by Priority Level registers in the NVIC that is part of
the SCS.
For Cortex-M3 or Cortex-M4 processors, the priority level can be changed dynamically.
For ARMv6-M processors, for example, the Cortex-M0 or Cortex-M0+, the dynamic changing
of the priority level of enabled interrupts or exceptions is not supported. You should setup the
priority levels before enabling the interrupts.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
Architecturally, the SCS is Strongly-ordered. Therefore, normal NVIC configurations do not
require a memory barrier. However,
DSB
and
ISB
instructions should be inserted after changing
the interrupt priority if the interrupt is already enabled and it is necessary that the interrupt, if
pended, executes at the new priority level.
Note
On ARMv6-M processors, you should only change the priority level of an interrupt when the
interrupt is disabled, otherwise the result is
UNPREDICTABLE.
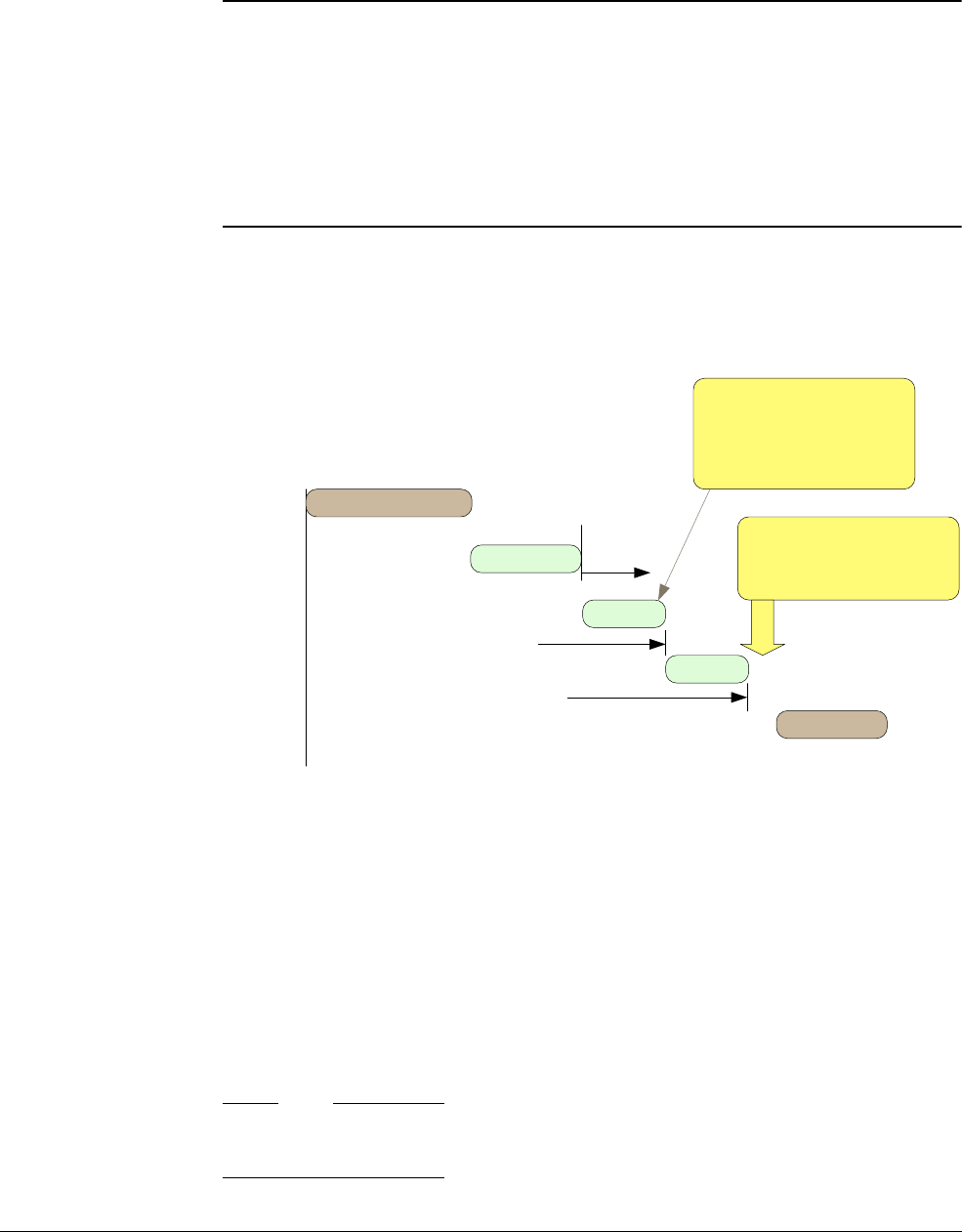
Figure 20 shows the architectural recommendation if changing a priority level and then
immediately triggering it.
Figure 20 Architectural recommendation if changing a priority level and then immediately triggering it
If the next operation is a
CPSIE
instruction, or an
MSR
instruction that enables or disables
interrupts, architecturally you should insert a
DSB
and then a
ISB
instruction.
DSB
SVC #<n>
STR <new_level>, [<NVIC_SHPR>]
Generate SVC and use
new priority
DSB can be used to
ensure update
completed
STR
DSB
Access to SCS
Priority updated
SVC
SVC exception uses
new priority
Stacking and
Vector fetch
ISB
ISB ensure that side
effects are visible
ISB
Time

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 34
ID091712 Non-Confidential
Figure 21 shows how the intentional blocking of a pended IRQ, and the use of memory barrier
instructions, ensures that the blocking is in place between configuration changes.
Figure 21 Barrier required after priority level change
Implementation requirements
In Cortex-M processors, an access to the interrupt priority registers already exhibits
DSB
behavior as these registers are implemented in the SCS.
On Cortex-M3 or Cortex-M4 processors:
• if it is necessary to have the side-effect of the priority change recognized immediately, an
ISB
instruction is required
• if it is not necessary to have the side-effect of the priority change recognized immediately,
before subsequent operations, it is not necessary to insert a memory barrier instruction.
Note
On Cortex-M0 and Cortex-M0+ processors, dynamic changing of priority on enabled interrupts
or exceptions is not supported.
DSB
MSR BASEPRI, <reg>
STR <new_level>, [<NVIC_IPR>]
Required ONLY if you
want a pended interrupt
to be recognized
immediately, otherwise
not required
DSB can be used to
ensure update
completed
STR
DSB
Access to SCS
Priority updated
ISB
ISB
NVIC recognizes the
interrupt blocked by
current level
CPU pipeline
update
MSR
Effective current priority level
(e.g. due to BASEPRI setting)
Higher priority
IRQ priority level
Current priority level
IRQ blocked by BASEPRI
IRQ blocked by current level
IRQ intentionally blocked

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 35
ID091712 Non-Confidential
In Cortex-M processors, there is no need to insert the memory barrier instructions if the next
operation is an
SVC
, see Figure 22.
Figure 22 Cortex-M processors do not require a memory barrier after a priority level change for SVC
For Cortex-M3 or Cortex-M4 processor, you might want to insert an
ISB
instruction if the
priority level change can result in the interrupt being accepted, and you want this interrupt to be
executed immediately. For example, after raising the priority level of a pending interrupt from
below current level to above current level, note that up to two more instructions can be executed
if a memory barrier is not used.
Figure 23 shows that a barrier might be required after a priority level change in Cortex-M3 and
Cortex-M4 processors.
Figure 23 Barrier might be required after priority level change in Cortex-M3 and Cortex-M4 processors
Note
For the Cortex-M0 and the Cortex-M0+ processors, the interrupt should be disabled at the NVIC
when changing priority level. The BASEPRI register is not available in these two processors.
SVC #<n>
STR <new_level>, [<NVIC_SHPR>]
Generate SVC and use
new priority
STR
Access to
SCS
Priority updated
SVC
SVC exception use
new priority
Stacking and
Vector fetch
MSR BASEPRI, <reg>
STR <new_level>, [<NVIC_IPR>]
Required ONLY if you
want a pended interrupt
to be recognized
immediately, otherwise
not required
STR
Access to
SCS
Priority updated
ISB
ISB
NVIC recognizes the new interrupt
priority level and accepts the interrupt
CPU pipeline update
MSR
Pended interrupt takes
place here, if any

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 36
ID091712 Non-Confidential
4.11 Vector table configuration - Vector Table Offset Register (VTOR)
On the Cortex-M3 and Cortex-M4 processors, the location of the vector table is determined by
the setting of VTOR (
SCB->VTOR
). This register is within the SCS and access to this register is
Strongly-ordered.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
Architecturally, a
DSB
instruction should be used after changing the VTOR if an exception is to
be generated immediately and should use the latest vector table setting.
Figure 24 shows that architecturally, a barrier might be required after a VTOR update.
Figure 24 Barrier might be required after a VTOR update
Implementation requirements
In Cortex-M3, Cortex-M4 and Cortex-M0+ processors, accesses to the SCS have the
DSB
behavior, so there is no need to insert the
DSB
instruction.
Figure 25 on page 37 shows that in Cortex-M3, Cortex-M4 and Cortex-M0+ processors, a
memory barrier is not required after a VTOR update.
DSB
SVC #<n>
STR <offset>, [<NVIC_VTOR]
Generate SVC and use
new vector table
DSB can be used to
ensure update
completed
DSB
Access to SCS
VTOR updated
SVC
SVC exception use
new vector
Vector fetch
STR
DMB
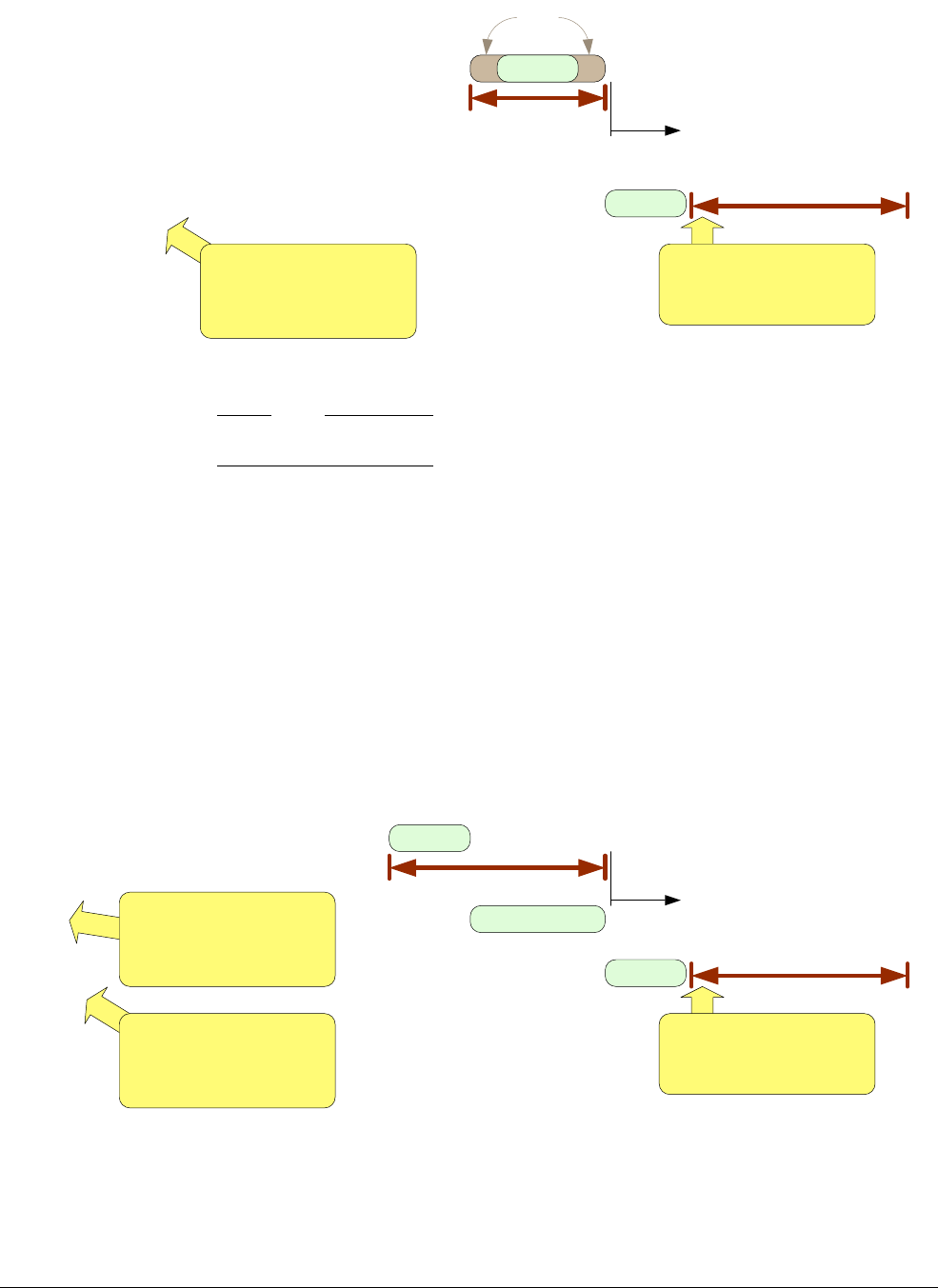
ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 37
ID091712 Non-Confidential
Figure 25 In Cortex-M3, Cortex-M4, and Cortex-M0+ processors, a memory barrier is not required after a VTOR update
Note
The VTOR register is not available on the Cortex-M0 processor.
4.12 Vector table configuration
Updating a vector table entry.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
If the vector table is in writable memory such as SRAM, either relocated by VTOR or a device
dependent memory remapping mechanism, then architecturally a memory barrier instruction is
required after the vector table entry is updated, and if the exception is to be activated
immediately.
Figure 26 shows that a barrier is required when updating a vector table entry.
Figure 26 Barrier is required after a vector table update
If the subsequent operation is a memory access, you can use a
DMB
instruction.
SVC #<n>
STR <offset>, [<NVIC_VTOR]
Generate SVC and use
new vector table
STR
Access to SCS
VTOR updated
SVC
SVC exception use
new vector
Vector fetch
DSB
DSB
SVC #<n>
STR <vector>, [<vector_address>]
Generate SVC and use
new vector
DSB can be used to
ensure update
completed
STR
DSB
Access to RAM
Vector updated
SVC
SVC exception use
new vector
Vector fetch
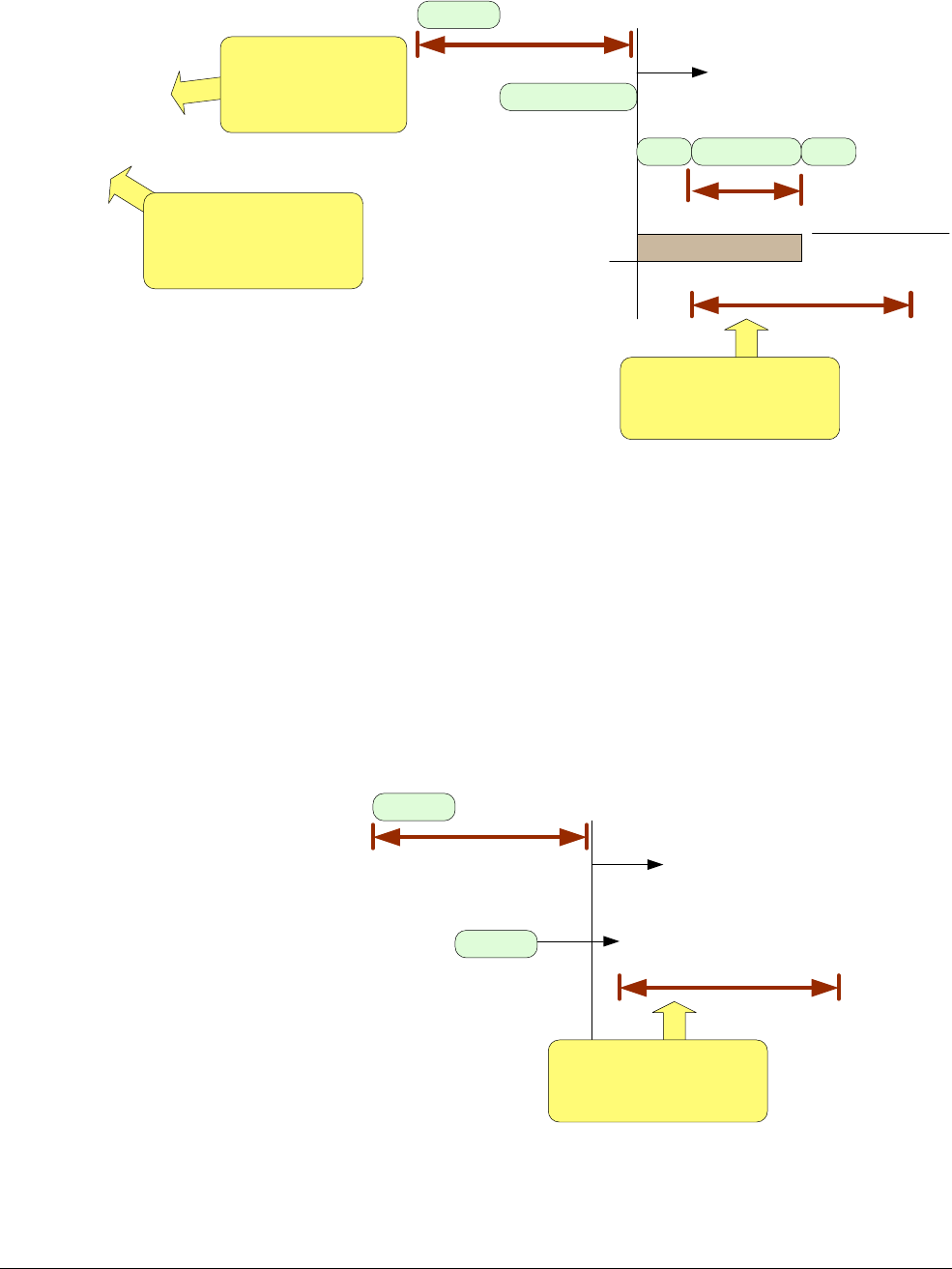
ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 38
ID091712 Non-Confidential
Figure 27 shows the use of the
DMB
instruction.
Figure 27 DMB instruction can be used during a vector table update if the subsequent operation is a memory access
As the example in Figure 27 shows, architecturally a
DMB
or
DSB
instruction should be inserted
because Strongly-ordered accesses do not guarantee memory order related to the vector table
update that is an access to Normal memory.
Implementation requirements
In the Cortex-M processors, omission of the
DSB
or
DMB
instructions does not cause any issue in
vector entry modifications, because the exception entry sequence does not start until the last
memory access is completed.
Figure 28 shows that in Cortex-M processors a SVC exception always gets the latest exception
vector.
Figure 28 In Cortex-M processors a SVC exception always gets the latest exception vector
DMB / DSB
STR <vector>, [<vector_address>]
Generate IRQ and use
new vector
DMB/DSB can be
used to ensure
update completed
before next store
STR
DMB/DSB
Access to RAM
Vector updated
STR
IRQ use new vector
Vector fetch
STR <enable>, [<NVIC_SETENA>]
Access to SCS
IRQ_Enable[n]
DMB DMB
STR <vector>, [<vector_address>]
STR
Access to RAM
Vector updated
SVC use new vector
Vector fetch
SVC
SVC
SVC does not start until outstanding
memory transfer completed.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 39
ID091712 Non-Confidential
4.13 Memory map change
Many microcontrollers contain a device specific memory remapping feature to permit the
memory map to be changed during runtime by programming a configuration register. The
configuration register should be placed in Device memory space.
The need for memory barrier instructions during the changing of a memory map configuration
depends on:
• whether the affected memory space covers program code, that is, it includes instructions
• the Device specific data path between the processor and the memory configuration
register, for example, a write buffer.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
In this case study, the following conditions apply:
• there is no device specific write-buffer affecting the memory-remap control register, apart
from any internal write buffer in the processor
• there is no additional hardware delay in the memory map switching.
Architecturally, you should insert memory barrier instructions before and after the memory map
changes:
... ; application code before switching
DSB ; Ensure all memory accesses are completed
STR <remap>, [<remap_reg>] ; Write to memory; map control register
DSB ; Ensure the write is completed
ISB ; Flush instruction buffer (optional, only required if
; the memory map change affects program memory)
... ; application code after switching
Figure 29 DSB and ISB are required after a memory map change
If the memory affected does not contain any program code, a
DSB
instruction is required after a
memory map change, but the
ISB
instruction can be omitted.
STR <data1>, [<memory_address1>]
STR
Buffered write
...
DSB / DMB
DSB / DMB
STR <remap>, [<remap_reg>]
DSB
STR
DSB
B label
Buffered
write
ISB
Flush pipeline after
remap
ISB
Label : MOV
fetch fetch d B
MOVfetch fetch d
d
d
Instructions could be
pre-fetched before
remap

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 40
ID091712 Non-Confidential
Figure 30 shows the
DSB
requirement after a memory map change.
Figure 30 A DSB is required after a memory map change
Implementation requirements
In this case study, the following conditions apply:
• there is no device specific write-buffer affecting the memory-remap control register, apart
from any internal write buffer in the processor
• there is no additional hardware delay in the memory map switching.
On Cortex-M processors:
• the
DSB
or
DMB
instruction before the memory map change is not required, because these
processors do not permit overlapping of two write operations
• the
DSB
-and-then-
ISB
sequence after the remapping is required to ensure the program code
is fetched using the latest memory map.
Note
Two assumptions are made in this case study. If these assumptions are invalid, for example, if
the data path between the processor and the memory control register contains an additional
system level write buffer, then the memory barrier instructions cannot guarantee that the transfer
is completed. In this case:
• You can carry out a read operation from the previously accessed region to ensure the write
buffer is drained. If multiple write transfers have been issued to various parts of the
system, multiple read operations might be required to ensure all of the write buffers are
drained.
• Alternatively, the microcontroller or SoC might have a status register that indicates if
there is any active on-going transfer, and when the memory remapping has been
completed. This permits the program code to account for an additional hardware delay on
the memory remapping logic if required.
ARM recommends that you contact chip suppliers and manufacturers for detailed device
specific recommendations.
STR <data1>, [<memory_address1>]
STR
Buffered write
...
DSB/DMB
DSB / DMB
STR <remap>, [<remap_reg>]
DSB
STR
DSB
LDR/STR <data2>, [<memory_address2>]
Buffered
write
LDR/STR
Memory access with
updated memory map

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 41
ID091712 Non-Confidential
4.14 Entering sleep modes
The Cortex-M processors provide
WFI
and
WFE
instructions for entering sleep.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
Architecturally, you should use the
DSB
instruction before executing the
WFI
or
WFE
instructions.
Figure 31 shows the architectural requirement.
Figure 31 DSB instruction is required before entering sleep mode
Implementation requirements
In simple designs that do no include a system level write buffer, the memory barrier instruction
is not required before entering sleep mode in the Cortex-M3 (r2p0 or later), Cortex-M4,
Cortex-M0+, and Cortex-M0 processors. This is handled by the processor.
If the internal bus contains a write buffer at the system level, outside of the processor, then the
situation is more complex. In this case, including a
DSB
instruction might not be sufficient
because the system control logic might stop the clocks before the buffered write is completed.
Figure 32 shows the possible effect of a system level write buffer when entering sleep mode.
Figure 32 Possible effect of system level write buffer when entering sleep mode
Stopping the clock signals early might not cause an error, this depends on the system level
design, the sleep operation being used, and which peripherals are being accessed immediately
before entering sleep mode.
ARM recommends that you contact your chip supplier or manufacturer for device specific
details.
This problem can normally be resolved by adding a dummy read operation through the write
buffer to ensure that the write buffer is drained.Figure 33 shows a possible workaround.
Data_array[n] = x; // memory access
__DSB();
__WFI(); // This cannot get executed until DSB completed
STR
Buffered write
WFI
DSB
Device_Reg = x; // peripheral access
__DSB(); // Finish when CPU write buffer completed
__WFI(); // Enter sleep before transfer completed.
STR
CPU write buffer
WFI
DSB
External write buffer
System clock
stopped
// (DSB does not help in this case)

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 42
ID091712 Non-Confidential
Figure 33 shows a possible workaround using a dummy read of the external write buffer.
Figure 33 Possible workaround for Implementation specific delay in sleep operation
4.15 Self-reset
The Cortex-M processors include a self-reset feature. You can trigger a system reset using the
SYSRESETREQ bit in the Application Interrupt and Reset Control Register (AIRCR). In the
CMSIS library, the C function
NVIC_SystemReset(void)
is available for using this feature.
Architectural requirement
ARM recommends that the architectural requirements are adopted.
A
DSB
is required before generating self-reset to ensure all outstanding transfers are completed.
The use of the
CPSID I
instruction is optional.
Figure 34 shows the architectural requirement.
Figure 34 Memory barrier used before self-reset
The
DSB
ensures all outstanding memory transfers are completed before starting the self-reset
sequence. The
CPSID I
is optional, it prevents an enabled IRQ triggering in the middle of the
self-reset sequence.
If the self-reset is generated by a peripheral, the requirement is similar.
Device_Reg = x; // peripheral write
__DSB(); // Not required for this case, but it is recommend for software porting
__WFI();
STR
CPU buffered write
WFI
DSB
External write buffer operation
System clock
stopped
Y = Device_Reg; // peripheral dummy read
LDR
CPU bus read
device
bus read
STR <data>, [<memory>]
DSB
STR
Buffered write
CPSID
DSB
CPSID I ; Disable interrupts (Optional)
LDR R0,=0x05FA0004
LDR R1,=NVIC_AIRCR
STR R0, [R1]
B .
LDR
LDR
STR
B
Reset takes place

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 43
ID091712 Non-Confidential
Figure 35 shows the requirement for a peripheral generated reset.
Figure 35 Peripheral generated reset
Implementation requirements
On Cortex-M processors, the
DSB
instruction is optional if the
CPSID
instruction is not used.
Because the accesses to the SCS already have the
DSB
instruction behavior, the self-reset cannot
start until the write operation is completed.
Figure 36 shows that Cortex-M processors do not reorder transfers, this permits the
DSB
instruction to be omitted.
Figure 36 Existing Cortex-M processors do not reorder transfer so the DSB instruction can be omitted
If the
CPSID
instruction is used, then the
DSB
instruction should be inserted. This ensures
CPSID
is
executed only when the previous transfer is finished. In this way, an imprecise bus fault resulting
from previous transfers, if any, can take place before disabling the interrupts.
Note
The bus fault exception is not available on ARMv6-M and therefore not available in the
Cortex-M0 processor.
STR <data>, [<memory>]
DSB
STR
Buffered write
CPSID
DSB
CPSID I ; Disable interrupts (optional)
LDR R0,=reset_cmd
LDR R1,=watchdog_reset_reg
STR R0, [R1] ; Can be buffered
B .
LDR
LDR
STR
Reset takes place
Buffered write
B
STR <data>, [<memory>]
STR
Buffered writeLDR R0,=0x05FA0004
LDR R1,=NVIC_AIRCR
STR R0, [R1]
B .
LDR
LDR
STR
B
Reset takes place

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 44
ID091712 Non-Confidential
Figure 37 shows the use of the
DSB
instruction if
CPSID
is used.
Figure 37 DSB is required if CPSID is used
If the system contains a write buffer at the bus level, a dummy read operation through the write
buffer can be used to ensure that the system level write buffer is drained before executing
CPSID
instruction and carrying out a self-reset.
Figure 38 shows the use of a dummy read to drain the system level write buffer.
Figure 38 A dummy read ensures that the system level write buffer is drained
Note
If you are using CMSIS 2.0 or later, the
NVIC_SystemReset(void)
function already includes the
DSB
instruction.
STR <data>, [<memory>]
DSB
STR
Buffered write
CPSID
DSB
CPSID I ; Disable interrupts (Optional)
LDR R0,=0x05FA0004
LDR R1,=NVIC_AIRCR
STR R0, [R1]
B .
LDR
LDR
STR
B
Reset takes place
Use DSB to
ensure imprecise
bus fault can
take place
STR <data>, [<memory>]
DSB
STR
CPU buffered write
CPSID
DSB
CPSID I ; Disable interrupts (Optional)
LDR R0,=0x05FA0004
LDR R1,=NVIC_AIRCR
STR R0, [R1]
B .
LDR
LDR
STR
B
Use DSB to
ensure portability
(optional)
External write buffer operation
LDR <data>, [<memory>] ; dummy read
LDR
CPU read
Memory read

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 45
ID091712 Non-Confidential
4.16 CONTROL register
The CONTROL register is one of the special registers implemented in the Cortex-M processors.
This can be accessed using
MSR
and
MRS
instructions.
Architectural requirement
ARM recommends that the architectural requirement is adopted.
Architecturally, after programming the CONTROL register, an
ISB
instruction should be used.
Example 6 shows the code required to switch from privileged to unprivileged execution. This is
not implemented in the Cortex M0 processor.
Example 6 Switching from privileged to unprivileged execution
MOVS R0, #0x1
MSR CONTROL, R0 ; Switch to non-privileged state
ISB ; Instruction Synchronization Barrier
...
The
ISB
instruction ensures that subsequent instructions are fetched with the correct privilege
level.
Figure 39 shows how the
ISB
instruction is used to ensure the correct privilege level is
maintained.
Figure 39 ISB is used after writing to the CONTROL register
You can also use the CONTROL register to select which stack pointer to use in thread mode.
Implementation requirement
In the Cortex-M processors, the omission of the
ISB
after writing to the CONTROL register does
not cause a program error, apart from the issue that instructions could have been pre-fetched
using the previous privilege level. The
ISB
instruction is only required if it is necessary to have
the subsequent instructions fetched with the correct privilege level.
MSR, CONTROL, <reg>
MSR
ISB
ISB
fetch dec B
MOVfetch decode
B label
Label : MOV
Instruction pipeline
flushed and re-fetched
dec
fetch
fetch
dec
fetch
Instructions could be
fetched in advance

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 46
ID091712 Non-Confidential
4.17 MPU programming
The MPU is an optional feature available on the Cortex-M0+, Cortex-M3, and Cortex-M4
processors.
Architecture requirements
ARM recommends that the architectural requirements are adopted.
Architecturally, the following conditions apply:
• The MPU configuration registers are in the SCS that is Strongly-ordered so there is no
need to insert memory barrier instructions between each step of the MPU programming.
• Strongly-ordered memory does not enforce ordering related to Normal memory accesses.
Architecturally, a
DMB
is needed before the MPU programming sequence. and after the
MPU programming is completed, a
DSB
should be used to ensure all settings are visible.
•An
ISB
instruction should also be added if the MPU setting change affects program
memory to ensure the instructions are re-fetched with updated MPU settings.
Figure 40 shows the MPU setup requirement.
Figure 40 MPU setup requirement
If the MPU programming steps are carried out in an exception handler, then the
ISB
instruction
is not required because the exception entry and exit boundary already has
ISB
behavior. For
example, in an application with RTOS running, the MPU region settings for user threads can be
updated during context switching that is carried out inside the PendSV exception handler.
Switching the exception exit sequences between the PendSV and the user threads ensures the
MPU settings take effect. This applies to both the architectural behavior and the implementation
of current Cortex-M processors.
DMB
STR <disable>, [<MPU_CTRL>]
STR <data>, [<memory_address>]
DMB can be used to
ensure MPU update
after all transfer to
memory completed
STR
DMB
Buffered write
STR
… ; MPU programming steps
… ; other instructions
STR <enable>, [<MPU_CTRL>]
DSB
STR
DSB
MPU access
ISB
Make sure pipeline is
flushed after MPU
update completed
ISBdecodefetch
decode
fetch fetch d B
MOVfetch fetch d
Branch to code in modified
MPU region. Use of branch
here is an example, it could
be other instructions.
B Label
Label : MOV
Before MPU
programming
After MPU
programming
MPU setting visible
MPU programming

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 47
ID091712 Non-Confidential
Implementation requirements
The omission of the
DMB
before entering MPU programming code on Cortex-M0+, Cortex-M3,
and Cortex-M4 processors, does not cause an issue.
The omission of the
DSB
after completing MPU programming code on Cortex-M0+, Cortex-M3,
and Cortex-M4 processors, does not cause an issue.
If the change to the MPU settings only affects data memory and not program memory, the
ISB
instruction is not required on the Cortex-M processors. If it is necessary for the subsequent
instructions to be fetched using the new MPU settings, the
ISB
instruction is required.
4.18 Multi-master systems
The use of memory barrier instructions can be important in multi-master systems if the code
must be portable.
Architectural requirement
ARM recommends that the architectural requirements are adopted.
Either a
DMB
or
DSB
instruction is needed when handling shared data and when the memory
ordering needs to be preserved.
For example, if a Direct Memory Access (DMA) controller is available in the system, the
DMB
instruction is required before starting DMA operations.
Figure 41 shows an example of
DMB
use in a multi-master system.
Note
You can use
DSB
instead of
DMB
.
Figure 41 The use of DMB in a multi-master system
Without the
DMB
, architecturally the two stores can be re-ordered or overlapped, with the
possibility of the DMA starting before the data array update completes.
Another multi-master example is the communication of information between two processors on
a shared memory. When passing data to another program running on a different processor, it is
common to write the data to a shared memory, and then set a software flag in the shared memory.
In this case you should use
DMB
or
DSB
instructions to ensure correct memory ordering between
the two memory accesses.
Data_array[n] = x; // memory access
__DMB();
dma_copy(); // Start DMA operation
STR
Buffered write
STR
DMB
Buffered write
STR
Without the DMB, the
DMA might start too early
DMB delay the start of
DMA enabling

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 48
ID091712 Non-Confidential
Figure 42 shows an example of
DMB
use for shared data in a multi-master system.
Figure 42 The use of DMB for shared data in a multi-master system
The interactions between two processors are not limited to shared memory. Another possible
interaction is an event communication. In this case, the
DSB
instruction might be needed to
ensure that the correct ordering between memory transfers and events is preserved
Figure 43 shows an example of
DSB
use for other multi-master interactions.
Figure 43 The use of DSB for other multi-master interactions
Implementation requirements
Omitting the
DMB
or
DSB
instruction in the examples in Figure 41 on page 47 and Figure 42 would
not cause any error because the Cortex-M processors:
• do not re-order memory transfers
• do not permit two write transfers to be overlapped.
In the Cortex-M3 and Cortex-M4 processors, the
DSB
instruction is required for the example in
Figure 43.
In the Cortex-M0 processor, the omission of the
DMB
or
DSB
instruction does not cause errors in
any of the three examples because there is no write buffer in the Cortex-M0 processor.
Data_array[n] = x; // memory access
__DMB();
sw_flag = 1; // Update software flag
STR
Buffered write
STR
DMB
Buffered write
sw_flag = 1; // memory access
__DSB();
__SEV(); // This cannot get executed until DSB completed
STR
Buffered write
SEV
DSB

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 49
ID091712 Non-Confidential
4.19 Semaphores and Mutual Exclusives (Mutex) - unicore and multicore
Semaphore and Mutex operations are essential in many Operating Systems (OS). They might be
used in single processor environments or multi-processor environments.
In a multi-processing environment, semaphore operations require software variables to be
placed in memory that is shared between multiple processors. In order to ensure correct
operation, memory barrier instructions should be used.
If cached memory is available in a multi-processor system, you must ensure correct cache
configurations are used so that the data in shared memory is coherent across all processors.
Architectural requirements
ARM recommends that the architectural requirements are adopted.
The
DMB
instruction should be used in Semaphore and Mutex operations.
Example 7 shows simple code for getting a lock. A
DMB
instruction is required after the lock is
obtained.
Example 7 Simple code for getting a lock
void get_lock(volatile int *Lock_Variable)
{ // Note: __LDREXW and __STREXW are CMSIS functions
int status = 0;
do {
while (__LDREXW(&Lock_Variable) != 0); // Wait until
// Lock_Variable is free
status = __STREXW(1, &Lock_Variable); // Try to set
// Lock_Variable
} while (status!=0); //retry until lock successfully
__DMB();// Do not start any other memory access
// until memory barrier is completed
return;
}
Similarly, code for releasing the lock should have a memory barrier at the beginning.
Example 8 shows simple code for releasing a lock. A
DMB
instruction is required before the lock
is released.
Example 8 Simple code for releasing a lock
void free_lock(volatile int *Lock_Variable)
{ // Note: __LDREXW and __STREXW are CMSIS functions
__DMB(); // Ensure memory operations completed before
// releasing lock
Lock_Variable = 0;
return;
}

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 50
ID091712 Non-Confidential
Implementation behavior
On microcontroller devices using the Cortex-M3 and Cortex-M4 processors, omission of the
DMB
instruction in semaphore and Mutex operations does not cause an error. However, this is not
guaranteed if:
• the processor has a cache
• the software is used in a multi-core system.
ARM recommends that the
DMB
instruction should be used in semaphores and Mutex operations
in OS designs.
The Cortex-M0 and Cortex-M0+ processors do not have exclusive access instructions.
4.20 Self modifying code
If a program contains self-modifying code, memory barriers would be required if the changed
program code is to be executed soon after being modified. Since the program code can be
pre-fetched, you should execute a
DSB
instruction followed by an
ISB
instruction to ensure the
pipeline is flushed.
Architectural requirement
ARM recommends that the architectural requirement is adopted.
The architectural requirement is to use a
DSB
instruction followed by an
ISB
instruction after
modifying program memory.
Example 9 The use of DSB and ISB instructions after modifying program memory
STR <new_instr>, [<inst_address1>]
DSB ; Ensure store is completed before flushing pipeline
ISB ; Flush pipeline
B <inst_address1> ; Execute updated program
Figure 44 shows the memory barrier instructions required to meet the architectural and
implementation requirements for self-modifying code.
Figure 44 Memory barrier instructions required for self-modifying code
STR <data1>, [<inst_address1>]
STR
Buffered write
DSB
ISB
inst_address1 :
MOV
ADD
fetch dec MOV
ADDfetch decode
ISB
DSB
dec
fetch
fetch
dec
fetch
fetch
Instructions could be
pre-fetched before
self-modifying

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 51
ID091712 Non-Confidential
If cached memory is present in the system, an additional cache flush operation should be used
to ensure that the instruction cache is updated.
Implementation requirement
In general, use
DSB
and then
ISB
after modifying program memory.
The
DSB
could be omitted if there is no write buffer or cache in the processor or at the system
level, for example, in Cortex-M0 based microcontrollers.
The Cortex-M3 and Cortex-M4 processors can pre-fetch up to six instructions. If an application
modifies an instruction in program memory and executes it shortly afterwards, the outdated
instruction could have been used. If the instruction is not used for some time after the
modification, the program might work without failure, but this cannot be guaranteed.
Some Cortex-M3 and Cortex-M4 designs might have an implementation specific program
cache to accelerate program memory accesses. Additional steps might be required to ensure the
program cache memory is invalidated after the program code modification.

ARM Cortex™-M Programming Guide to Memory Barrier Instructions
ARM DAI 0321A Copyright © 2012 ARM Limited. All rights reserved. 52
ID091712 Non-Confidential
5 Additional Reading
This section lists publications from both ARM and third parties that provide additional
information. See the ARM Information Center,
http://infocenter.arm.com
for access to ARM
documentation.
5.1 User guides
The following user guides can be downloaded from the ARM Infocenter:
• Cortex-M0 User Guide Reference Material (ARM DUI 0467)
• Cortex-M3 User Guide reference Material (ARM DUI 0450)
• Cortex-M4 User Guide Reference Material (ARM DUI 0508).
5.2 Architecture reference manuals
The following ARM Architecture Reference Manuals can be downloaded from the ARM
Infocenter subject to user registration:
• ARMv7-M Architecture Reference Manual (ARM DDI 0403)
• ARMv6-M Architecture Reference Manual (ARM DDI 0419).
5.3 Application notes
The following application note can be downloaded from the ARM Infocenter:
Application Note 179 - Cortex-M3 Embedded Software Development (ARM DAI 0179).
5.4 Software standards
The following software package and its documentation can be downloaded from the ARM
website subject to user registration:
• Cortex Microcontroller Software Interface Standard,
http://www.arm.com/cmsis
.
5.5 Other publications
The following books are available from various book shops and on-line retailers:
• The definitive Guide to the ARM Cortex-M3, Second Edition (Joseph Yiu
ISBN: 978-1-85617-963-8)
• The Definitive Guide to the ARM Cortex-M0 (Joseph Yiu ISBN: 978-0-12-385477-3).
